Author – Karol Kocur
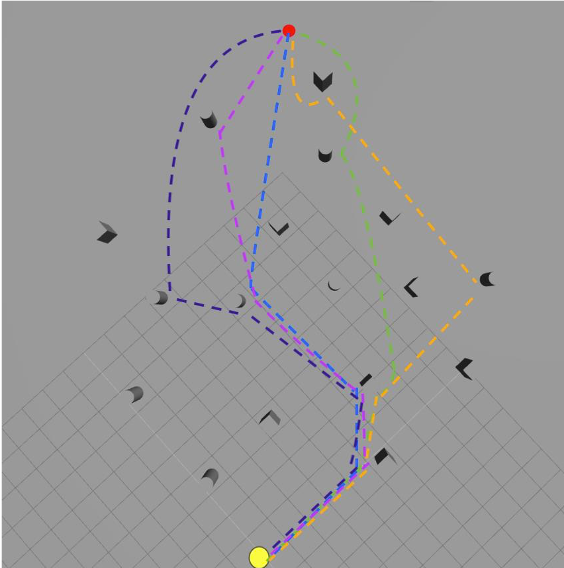
The aim of this study was to develop an algorithm for controlling an autonomous vehicle using artificial intelligence solutions, based on data provided by sensors analyzing the vehicle’s environment. Using the real model, its virtual counterpart was created, having a LIDAR distance sensor and a GPS sensor. A specially adapted environment required for the process of learning and testing the vehicle was also created. The algorithm controlling the vehicle was based on Deep Q-learning. The vehicle is able to drive from the starting point to the end point determined by the GPS coordinates, avoiding obstacles that appear on its way.